30.06.2021. At the Wearable Robotics Lab of Scuola Superiore Sant’Anna (SSSA), we are working on the design and development of the powered exoskeletons for the ReHyb project. The combination of a shoulder-elbow- and a hand-wrist exoskeleton (namely ReHyb-HP and ReHyb-Hand) will allow patients with moderate to severe upper-limb movement limitations to carry out rehabilitation treatments in clinic, receiving adaptive support for functional mobilization of the arm and assistance in grasping tasks.
A randomized clinical trial is already running at Versilia Hospital (Lido di Camaiore, Lucca, Italy), using a powered elbow exoskeleton with similar characteristics as the one developed for ReHyb. The study aims to investigate the efficacy of robotically assisted training relative to conventional physical therapy, as well as to validate a novel instrumented method for elbow spasticity and stiffness evaluation.
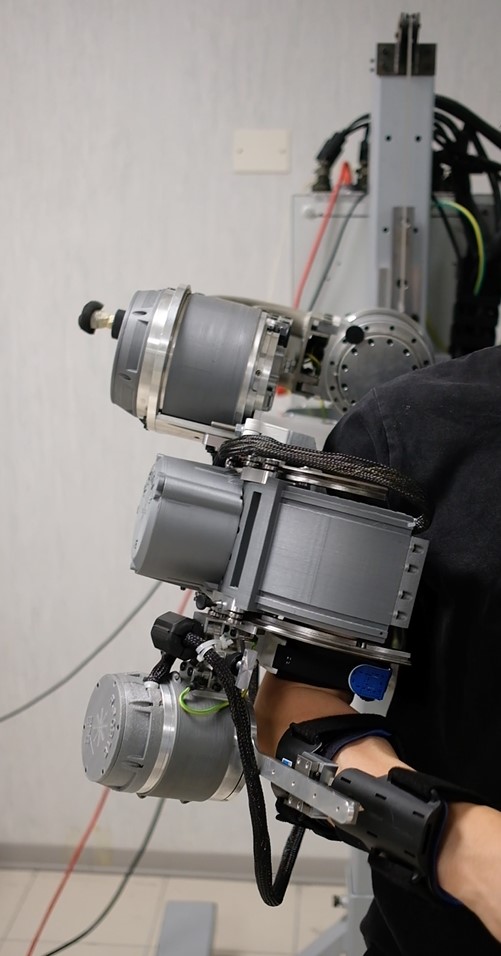
In parallel, our team is working on evaluating the ergonomic design of the novel shoulder-elbow exoskeleton’s passive kinematic chain (re-engineered from an already available platform – the NESM-γ). On the control architecture level, remote integration sessions with TUM partners are running to implement control strategies for safe human-robot interaction based on data-driven models, and a sympathetic controller to perform activities of daily living.
Finally, in strong synergy with all the ReHyb technical partners, SSSA is integrating all the technological developments of the project in a modular fashion. By exploiting system modularity, the ReHyb platform(s) will be able to personalize the rehabilitation treatment according to the varying and specific needs of the stroke population, supporting the continuum-of-care rehabilitation concept from the clinical setting to the home environment.