26.05.2020. At IBEC in the SPECS-lab we are working to design and build the Rehyb cognitive architecture that will link the user to various external devices such as robotic actuator (exoskeleton), physiological sensors and effectors, and the VR/AR rehabilitation scenarios.
This architecture provides the base for user modelling and cognitive decisions and it is based on a modular environment that will offer flexibility in the rehabilitation intervention as well and individualization of the training scenarios addressing the need of each user.
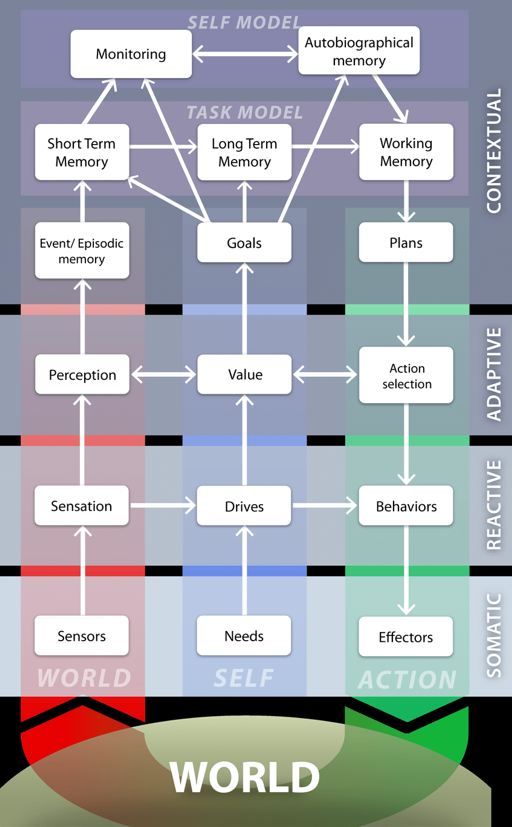
This architecture will be built upon the Distributed Adaptive Control (DAC) (Verschure 2012, Verschure et al., 2003) theory rendering an architecture for external devices control that allows for modularity, sensory integration, the ability to process large amounts of behavioural data and extract user and performance statistics, features that are a fundamental objective of the project.