21.09.2021. In the ReHyb project, the Human Robotics Group at ICL aims at modelling the hand neuromechanics of stroke patients and their internal states that are not directly observable. These models will then be used to inform the control algorithm of the hybrid prosthesis to provide a personalized and adaptive assistance during activities of daily living and rehabilitative training.
To achieve this goal, we have developed a portable wrist robotic interface, HRX-1 (Figure 1), and we are using it in combination with functional electrical stimulation (FES), to provide assistance to the user in a target tracking task (Figure 2). HRX-1 provides controlled actuation of wrist flexion and extension and sensing of wrist motion and torque. HRX-1 has one degree-of-freedom which makes it compact and easy to use for neuromechanics research and clinical studies. The FES device, developed by our ReHyb partner Tecnalia, is placed on the wrist flexor and extensor muscles.
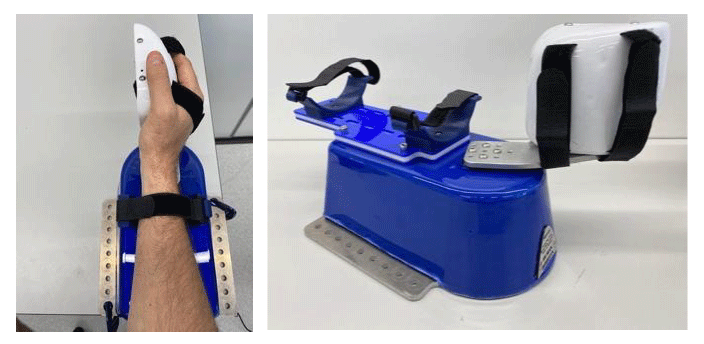
Figure 1: HRX-1 Robot, HumanRobotiX
With this system (Figure 2), we have developed a control algorithm that varies the amount of torque and electrical stimulation provided to the user based on their performance in the tracking task. The further one’s wrist position is from the target displayed on screen, the more FES and robotic assistance they receive.

Figure 2: Wrist tracking task with combined FES and robotic assistance
We are currently running experiments on healthy participants at ICL with this system where we collect electromyography (EMG) and electroencephalography (EEG), on top of the position and torque recordings from the robot (see Video). In this experiment, participants will be asked to perform the task with different types of assistance: robot only, FES only, combination of robot and FES and no assistance. Here we aim at understanding which type of assistance helps the user best and which is most comfortable. The results of this experiment will also allow us to estimate muscle fatigue and mental effort using EMG and EEG during assisted and non-assisted tasks. The outcomes of this work will then inform the requirements for designing and implementing an adaptive algorithm using model-based combined FES and robotic assistance.
The next steps for ICL within the ReHyb project include implementing this setup at our partner clinic, Schön Klinik Bad Aibling and in collaboration with Technische Universität München, where a study will be run with stroke patients to assess motor learning with these different types of assistance during wrist tracking tasks.