15.06.2023. Recent technological advancements have led to the development of various innovative solutions for neurorehabilitation, among which the combination of wearable exoskeletons and virtual reality-based exercises has emerged as a promising approach. However, a notable limitation in the field lies in the inadequate integration and coordination of different modules within virtual reality-robotic synergistic rehabilitative systems, primarily due to the absence of effective control architecture.
The SPECS-lab at Radboud University has conducted an experimental investigation to evaluate the efficacy of a rehabilitation coach designed to assist individuals with neurological impairments and improve their overall quality of life. In this pilot study, we propose a multi-level adaptive coaching paradigm that addresses this limitation by employing digitized representations of human subjects receiving exoskeleton-assisted support. Through the utilization of a distributed control architecture, the proposed paradigm facilitates adaptation. It aims to establish a framework for personalized interventions that are more accessible compared to currently available treatments.
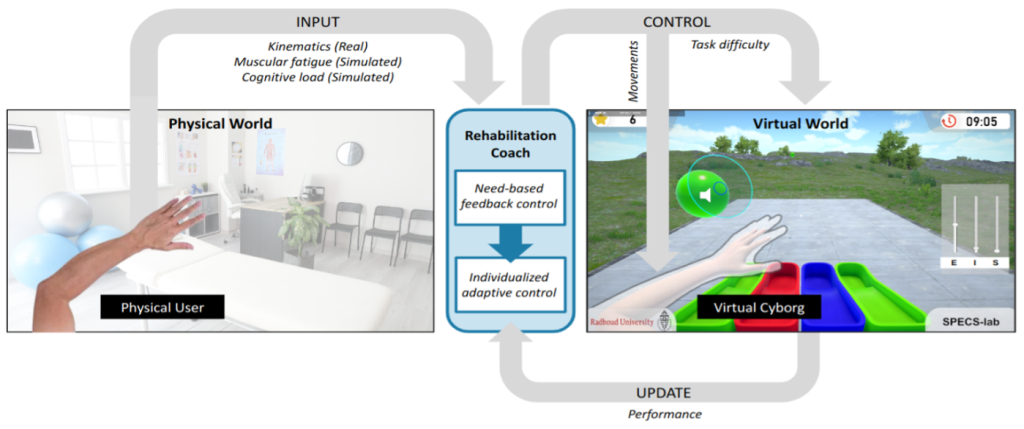
General overview of the VR-robotic synergistic coaching system for individualized rehabilitation. The real-world user’s movements (left) are monitored and translated into the virtual world (right). The rehabilitation coach (middle) serves as a control interface between the physical and virtual worlds. Control signals from the rehabilitation coach are used to drive the virtual exoskeleton (gray-bordered zone) and are coupled with the actual tracked movements to form the final virtual movement.
The results obtained from our study demonstrate that the adaptive coaching system effectively maintains an optimal level of simulated cognitive load and fatigue while achieving superior average performance. This pilot study represents an initial exploration for designing effective individualized adaptation within the context of VR-robotic synergistic neurorehabilitation, thereby offering significant potential for further research in this domain.
We are pleased to announce that this study has been accepted for presentation at the Living Machine Conference, scheduled to be held from 9-11 July 2023 in Genova, Italy.1
1 Distributed adaptive control for virtual cyborgs: A case study for personalized rehabilitation
S. Kahali, T. Ngo, T. S. Mandahar, E. Martínez-Bueno, O. Guerrero-Rosado, H. López-Carral, I. T. Freire, A. Mura, and P. F. M. J. Verschure. Donders Institute for Brain, Cognition and Behaviour, 6525 GD Nijmegen, The Netherlands